
Technologie LiDAR
Méthode d'acquisition
Les systèmes laser aéroportés permettent d'obtenir, à des coûts relativement modestes, des données altimétriques précises sur de grands territoires. Le principe d'acquisition repose sur la mesure du temps que met une impulsion laser (généralement dans le proche infrarouge) pour parcourir le chemin aller et retour entre la plate-forme aéroportée (avion ou hélicoptère) et le terrain qu'elle survole. Les systèmes de mesure étant couplés à un mécanisme de balayage du faisceau, il est possible de couvrir rapidement de grandes superficies avec une densité élevée de points (1 à plus de 10 points par mètre carré). En connaissant la position précise de la source laser par GPS et la direction de son inclinaison grâce à une centrale inertielle, il est possible de calculer une position et une altitude pour chaque écho. Un fichier de coordonnées (x, y, z) est alors produit.
L'acronyme "LiDAR" (Light Detection And Ranging) désigne essentiellement le principe de télémétrie laser, mais aussi par extension l'appareil de télémétrie lui-même.

Plusieurs retours pour une impulsion
Selon la configuration du terrain, plusieurs réflexions peuvent être détectées pour une seule impulsion. Ce cas de figure se produit essentiellement en forêt ou en bord de bâtiment. Selon le système utilisé, il sera possible d'enregistrer un retour (le premier ou le dernier écho) ou plusieurs retours pour une même impulsion (jusqu'à 5 échos).


Carte d'intensité


Les systèmes LiDAR ont le potentiel d’enregistrer l’intensité du signal retour. Contrairement aux capteurs passifs, les systèmes LiDAR sont des capteurs actifs qui produisent leur propre énergie pour illuminer la cible. Les autres sources d’illumination (comme le Soleil) sont alors considérées comme du bruit.
L’intensité de réflexion (Ir) d’une impulsion laser sur une surface homogène est ainsi proportionnelle à la puissance d’émission (Pe) multipliée par la réflectivité de la surface (r), le tout divisé par la surface illuminée (A): Ir ÷ Pe/A⋅r
L’intensité mesurée Im se définit par la relation (H correspondant à la hauteur du capteur): Im ÷ Pe/H2⋅r
Il en résulte qu’une même surface illuminée par un capteur réfléchit un signal d’une intensité qui varie en fonction de la hauteur de vol. Une normalisation des valeurs d’intensité devient alors nécessaire pour
rendre les mesures comparables entre elles.
Ci-dessous, une image d'un nuage de points bruts colorisé avec l'information de l'intensité retour. On observe que le marquage routier ressort particulièrement bien.
Classification du nuage de points bruts
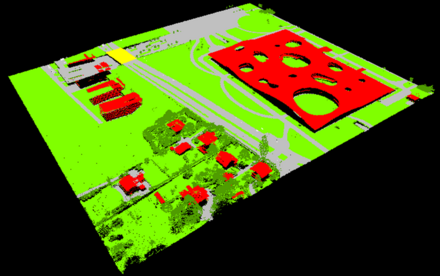
Le processus de classification des données LiDAR consiste à attribuer une information thématique aux points bruts. Dans un premier temps, il s’agit de séparer les échos au sol des échos sur les objets de surface (bâtiment, arbres, etc.). On est ainsi en mesure de générer deux modèles distincts: un modèle numérique de terrain (MNT), basé sur les échos au sol, et un modèle numérique de surface (MNS), construit avec l’ensemble des points bruts collectés. Cette étape s’opère sur les données déjà calibrées.
Le nombre et la définition de classes supplémentaires dépend ensuite du ou des domaines d’application visés. Les classes les plus couramment rencontrées sont: les points au sol, les bâtiments, les ponts, la végétation (avec parfois une distinction entre la végétation basse et la forêt), les lignes à haute tension, ainsi que les mesures considérées comme erronées (outliers) provenant par exemple d’une réflexion sur un oiseau ou sur la plate-forme elle-même. La classe des outliers est généralement éliminée à la fin du traitement.
Domaines d'application
Mensuration officielle: détection des ruisseaux et des chemins en forêt, calcul des hauteurs de bâtiment, relevé automatique des limites de forêts, calcul des courbes de niveaux, etc.
Agriculture et foresterie: calcul automatique des taux de boisement en pâturages boisés, inventaire forestier, analyse du potentiel bois-énergie, cartographie de la hauteur de la canopée, etc.
Dangers naturels: cartographie des zones inondables, des glissement de terrain, des chutes de blocs, etc.
Environnement et énergie: cadastre du bruit, analyse de l'impact visuel des projets éoliens, analyse du potentiel d'énergie voltaïque de toiture, etc.
Autres: modélisation des bâtiments (socle 3D), analyse multi-échelle en génomique environnementale, archéologie, avant-projet routier, etc.